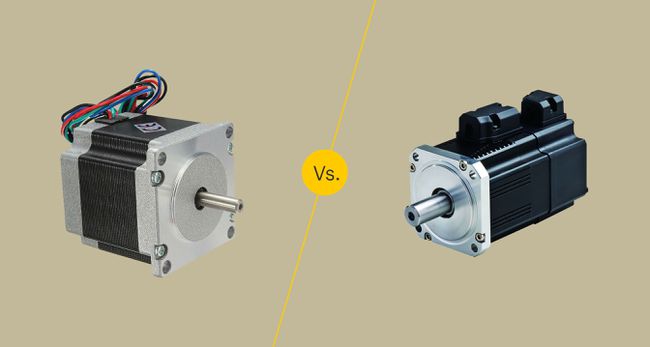
स्टेपर मोटर्स बनाम। सर्वो मोटर्स
सर्वो मोटर और a. के बीच चयन करना स्टेपर मोटर कई डिज़ाइन कारकों के संतुलन को शामिल करते हुए काफी चुनौती हो सकती है। लागत विचार, टोक़, गति, त्वरण और ड्राइव सर्किटरी सभी आपके आवेदन के लिए सर्वश्रेष्ठ मोटर का चयन करने में एक भूमिका निभाते हैं। हमने आपके आवेदन के लिए सही मोटर चुनने में आपकी मदद करने के लिए उनके उपयोग और ताकत की समीक्षा की है।
समग्र निष्कर्ष
स्टेपर मोटर्स
50 से 100 चुंबकीय जोड़े
नियंत्रित करने में आसान
अधिक लचीलापन और सटीकता
कम गति पर बेहतर
सर्वो मोटर्स
चार से 12 चुंबकीय जोड़े
कम स्टॉप
एक रोटरी एन्कोडर की आवश्यकता हो सकती है
उच्च गति पर बेहतर
स्टेपर और सर्वो मोटर्स दो प्रमुख तरीकों से भिन्न होते हैं: उनका मूल निर्माण और उनके नियंत्रण के साधन। दोनों एक प्रणाली को स्थानांतरित करने के लिए घूर्णी बल प्रदान करते हैं। स्टेपर्स में अधिक कदम होते हैं, या स्थिति मोटर धारण कर सकती है।
कुल मिलाकर, सर्वो मोटर्स उच्च गति, उच्च टोक़ अनुप्रयोगों के लिए सर्वोत्तम हैं। स्टेपर मोटर का डिज़ाइन मोटर को संचालित करने की आवश्यकता के बिना एक निरंतर होल्डिंग टॉर्क प्रदान करता है। कम गति पर स्टेपर मोटर का टॉर्क समान आकार के सर्वो मोटर से अधिक होता है। हालांकि, सर्वो उच्च समग्र गति प्राप्त कर सकते हैं।
चरणों की संख्या: स्टेपर मोटर्स अधिक विविधता प्रदान करते हैं
स्टेपर मोटर्स
अधिक चुंबकीय जोड़े, जिसका अर्थ है अधिक कदम
एक विशिष्ट कदम तक पहुंचना आसान
सर्वो मोटर्स
कम चुंबकीय जोड़े
सटीक स्थान पर जाना कम आसान
स्टेपर मोटर्स में आमतौर पर उत्तरी और दक्षिणी ध्रुवों के 50 से 100 चुंबकीय जोड़े होते हैं जो या तो स्थायी चुंबक या विद्युत प्रवाह द्वारा उत्पन्न होते हैं। इसकी तुलना में, सर्वो मोटर्स में कम पोल होते हैं, अक्सर कुल मिलाकर 4 से 12।
प्रत्येक मोटर शाफ्ट के लिए एक प्राकृतिक रोक बिंदु प्रदान करता है। स्टॉप की अधिक संख्या एक स्टेपर मोटर को प्रत्येक के बीच सटीक और सटीक रूप से स्थानांतरित करने की अनुमति देती है और इसे कई लोगों के लिए बिना किसी स्थिति प्रतिक्रिया के संचालित करने की अनुमति देती है अनुप्रयोग. सर्वो मोटर्स को अक्सर a. की आवश्यकता होती है रोटरी कोडित्र मोटर शाफ्ट की स्थिति पर नज़र रखने के लिए, खासकर अगर इसे सटीक गति करने की आवश्यकता हो।
ड्राइविंग तंत्र: स्टेपर अधिक सटीक होते हैं
स्टेपर मोटर्स
किसी विशिष्ट स्थान पर ड्राइव करना आसान
चरणों की संख्या के आधार पर अंतिम स्थिति खोजें
सर्वो मोटर्स
सटीक रूप से नियंत्रित करना कठिन
वर्तमान समायोजन के आधार पर अंतिम स्थिति पढ़ें
एक स्टेपर मोटर को एक सटीक स्थिति में चलाना एक सर्वो मोटर चलाने की तुलना में बहुत आसान है। स्टेपर मोटर के साथ, सिंगल ड्राइव पल्स मोटर शाफ्ट को एक कदम, एक पोल से दूसरे पोल तक ले जाएगा। चूंकि किसी दिए गए मोटर का चरण आकार निश्चित मात्रा में घूर्णन पर तय होता है, इसलिए एक सटीक स्थिति में जाना दालों की सही संख्या भेजने का मामला है।
इसके विपरीत, सर्वो मोटर्स वर्तमान एन्कोडर स्थिति और उस स्थिति के बीच अंतर को पढ़ती हैं जिसे उन्हें आदेश दिया गया था और सही स्थिति में जाने के लिए आवश्यक वर्तमान को समायोजित किया गया था। आज के के साथ डिजिटल इलेक्ट्रॉनिक्स, स्टेपर मोटर्स को नियंत्रित करना बहुत आसान है सर्वो मोटर्स की तुलना में।
प्रदर्शन: सर्वो उच्च गति पर बेहतर हैं
सर्वो मोटर्स
कम अधिकतम आरपीएम (लगभग 2,000)
उच्च गति पर कम टॉर्क उपलब्ध
स्टेपर मोटर्स
बहुत अधिक गति से चल सकता है
RPM के साथ टॉर्क नहीं खोता
उन अनुप्रयोगों के लिए जिन्हें उच्च गति और उच्च टोक़ की आवश्यकता होती है, सर्वो मोटर्स चमकते हैं। स्टेपर मोटर्स 2,000 आरपीएम की गति के आसपास चोटी पर हैं, जबकि सर्वो मोटर्स कई गुना तेजी से उपलब्ध हैं। सर्वो मोटर्स भी उच्च गति पर अपनी टोक़ रेटिंग बनाए रखते हैं, उच्च गति पर एक सर्वो से रेटेड टोक़ का 90% तक उपलब्ध है।
स्टेपर मोटर्स की तुलना में सर्वो अधिक कुशल हैं, जिनकी क्षमता 80-90% के बीच है। एक सर्वो मोटर छोटी अवधि के लिए अपने रेटेड टॉर्क का लगभग दोगुना आपूर्ति कर सकती है, जिससे जरूरत पड़ने पर खींचने की क्षमता मिलती है। इसके अलावा, सर्वो मोटर्स शांत हैं, उपलब्ध हैं एसी और डीसी ड्राइव, और कंपन न करें या अनुनाद मुद्दों से पीड़ित न हों।
स्टेपर मोटर्स अपने टॉर्क का एक महत्वपूर्ण हिस्सा खो देते हैं क्योंकि वे अपनी अधिकतम चालक गति के करीब पहुंच जाते हैं। अधिकतम गति के 90% पर रेटेड टोक़ के 80% का नुकसान विशिष्ट है। स्टेपर मोटर्स भी लोड को तेज करने में सर्वो मोटर्स की तरह अच्छे नहीं होते हैं। एक लोड को बहुत तेजी से तेज करने का प्रयास जहां स्टेपर अगले ड्राइव पल्स से पहले अगले चरण में जाने के लिए पर्याप्त टोक़ उत्पन्न नहीं कर सकता है, जिसके परिणामस्वरूप चरण छोड़ दिया जाएगा और स्थिति में नुकसान होगा।
अंतिम फैसला
आपके आवेदन के लिए सर्वश्रेष्ठ मोटर का चयन आपके सिस्टम के लिए कुछ प्रमुख डिजाइन मानदंडों पर निर्भर करता है जिसमें शामिल हैं: लागत, स्थितिगत सटीकता की आवश्यकताएं, टॉर्क की आवश्यकताएं, ड्राइव पावर की उपलब्धता और त्वरण आवश्यकताएं।
स्टेपर मोटर्स कम त्वरण, उच्च होल्डिंग-टॉर्क अनुप्रयोगों के लिए बेहतर अनुकूल हैं। सर्वो मोटर्स स्टेपर मोटर्स की तुलना में अधिक शक्ति देने में सक्षम हैं, लेकिन सटीक स्थिति के लिए बहुत अधिक जटिल ड्राइव सर्किटरी और पोजिशनल फीडबैक की आवश्यकता होती है। उन्हें अक्सर गियरबॉक्स की आवश्यकता होती है, खासकर कम गति के संचालन के लिए। गियरबॉक्स और पोजिशन एनकोडर की आवश्यकता सर्वो मोटर डिजाइन को अधिक यांत्रिक रूप से जटिल बनाती है और सिस्टम के लिए रखरखाव आवश्यकताओं को बढ़ाती है।
यदि स्थितीय सटीकता आवश्यक है, तो या तो मोटर पर भार अपने टोक़ से अधिक नहीं होना चाहिए, या सटीकता सुनिश्चित करने के लिए स्टेपर को स्थिति एन्कोडर के साथ जोड़ा जाना चाहिए। स्टेपर मोटर्स भी कंपन और अनुनाद समस्याओं से ग्रस्त हैं। कुछ गति पर, आंशिक रूप से लोड गतिकी के आधार पर, a स्टेपर मोटर प्रतिध्वनि में प्रवेश कर सकती है और लोड को चलाने में असमर्थ हो। इसके परिणामस्वरूप छोड़े गए कदम, रुकी हुई मोटरें, अत्यधिक कंपन और शोर होता है।