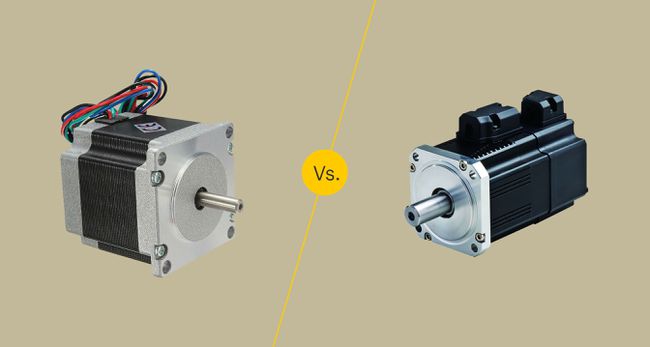
Stepper Motors vs. Servo mootorid
Servomootori ja a samm-mootor võib olla üsna suur väljakutse, mis hõlmab mitmete disainitegurite tasakaalustamist. Teie rakenduse jaoks parima mootori valimisel mängivad rolli kulukaalutlused, pöördemoment, kiirus, kiirendus ja ajam. Vaatasime üle nende kasutusalad ja tugevused, et aidata teil valida oma rakenduse jaoks õige mootor.
Üldised järeldused
Sammmootorid
50 kuni 100 magnetpaari
Lihtsam kontrollida
Rohkem paindlikkust ja täpsust
Parem madalatel kiirustel
Servo mootorid
Neli kuni 12 magnetpaari
Vähem peatusi
Võib vajada pöörlevat kodeerijat
Parem suurematel kiirustel
Samm- ja servomootorid erinevad kahel peamisel viisil: nende põhikonstruktsioon ja juhtimisvahendid. Mõlemad annavad süsteemi liigutamiseks pöörlemisjõu. Astmetel on rohkem samme või positsioone, mida mootor suudab hoida.
Üldiselt sobivad servomootorid kõige paremini suure kiiruse ja suure pöördemomendiga rakenduste jaoks. Sammmootori konstruktsioon tagab püsiva pöördemomendi, ilma et oleks vaja mootorit toita. Sammmootori pöördemoment madalatel pööretel on suurem kui sama suurusega servomootoril. Servod võivad aga saavutada suurema üldkiiruse.
Astmete arv: samm-mootorid pakuvad rohkem valikut
Sammmootorid
Rohkem magnetpaare, mis tähendab rohkem samme
Lihtsam jõuda konkreetse sammuni
Servo mootorid
Vähem magnetpaare
Täpse asukohta on vähem lihtne
Sammmootoritel on tavaliselt 50–100 magnetpaari põhja- ja lõunapoolust, mis on genereeritud kas püsimagneti või elektrivoolu abil. Võrdluseks, servomootoritel on vähem pooluseid, sageli kokku 4 kuni 12.
Igaüks neist pakub mootori võllile loomulikku peatumiskohta. Suurem peatuste arv võimaldab samm-mootoril liikuda täpselt ja täpselt nende vahel ning võimaldab sellel töötada ilma asukoha tagasisideta rakendusi. Servomootorid nõuavad sageli a pöörlev kodeerija et jälgida mootori võlli asendit, eriti kui see vajab täpseid liigutusi.
Sõidumehhanism: Stepperid on täpsemad
Sammmootorid
Lihtsam sõita kindlasse kohta
Otsige sammude arvu põhjal lõplikku asukohta
Servo mootorid
Raskem täpselt kontrollida
Lugege lõppasendit reguleerimisvoolu põhjal
Sammmootori juhtimine täpsesse asendisse on palju lihtsam kui servomootori juhtimine. Sammmootori puhul liigutab üks ajamiimpulss mootori võlli ühe sammu, ühelt poolilt teisele. Kuna antud mootori astme suurus on fikseeritud teatud pöörlemiskiirusel, on täpsesse asendisse liikumine õige arvu impulsside saatmise küsimus.
Seevastu servomootorid loevad erinevust vooluanduri positsiooni ja neile antud asendi vahel ning reguleerivad õigesse asendisse liikumiseks vajalikku voolu. Tänasega digitaalne elektroonika, samm-mootoreid on palju lihtsam juhtida kui servomootorid.
Jõudlus: servod on suurtel kiirustel paremad
Servo mootorid
Madalam maksimaalne pöörete arv (umbes 2000)
Suurematel pööretel on saadaval väiksem pöördemoment
Sammmootorid
Saab sõita palju suurematel kiirustel
Ei kaota pöördemomenti pöörete arvuga
Rakendustes, mis nõuavad suurt kiirust ja suurt pöördemomenti, säravad servomootorid. Sammmootorite maksimaalne kiirus on umbes 2000 p / min, samas kui servomootorid on saadaval mitu korda kiiremini. Servomootorid säilitavad oma pöördemomendi ka suurel kiirusel, kuni 90% nimipöördemomendist on saadaval servo suurel kiirusel.
Servod on tõhusamad kui samm-mootorid, nende kasutegur on 80–90%. Servomootor suudab lühikese aja jooksul anda ligikaudu kahekordse nimipöördemomendi, pakkudes vajaduse korral võimsust. Lisaks on servomootorid vaiksed, saadaval Vahelduv- ja alalisvooluajam, ja ärge vibreerige ega kannata resonantsprobleemide all.
Sammmootorid kaotavad oma maksimaalsele juhikiirusele lähenedes märkimisväärse osa oma pöördemomendist. Tüüpiline on 80% nimipöördemomendi kadu 90% maksimaalsest kiirusest. Sammmootorid ei ole ka koormuse kiirendamisel nii head kui servomootorid. Kui proovite koormat liiga kiiresti kiirendada, kui aste ei suuda genereerida piisavalt pöördemomenti, et liikuda järgmisele sammule enne järgmist ajamiimpulssi, jäetakse samm vahele ja kaob asend.
Lõplik kohtuotsus
Teie rakenduse jaoks parima mootori valimine sõltub teie süsteemi mõnest peamisest disainikriteeriumist, sealhulgas kulu, asukoha täpsuse nõuded, pöördemomendi nõuded, ajami võimsuse saadavus ja kiirendus nõuetele.
Sammmootorid sobivad paremini väiksema kiirenduse ja suure hoidmismomendiga rakenduste jaoks. Servomootorid on võimelised andma rohkem võimsust kui samm-mootorid, kuid vajavad täpseks positsioneerimiseks palju keerukamat ajami vooluringi ja asukoha tagasisidet. Sageli vajavad nad käigukasti, eriti väiksema kiirusega töötamiseks. Käigukasti ja asendikooderi nõue muudab servomootorite konstruktsioonid mehaaniliselt keerukamaks ja suurendab süsteemi hooldusnõudeid.
Kui asukoha täpsus on oluline, ei tohi mootori koormus kunagi ületada selle pöördemomenti või tuleb astmeseade täpsuse tagamiseks kombineerida asendianduriga. Sammmootorid kannatavad ka vibratsiooni- ja resonantsprobleemide all. Teatud kiirustel, osaliselt sõltuvalt koormuse dünaamikast, a samm-mootor võib siseneda resonantsi ja ei saa koormat juhtida. Selle tulemuseks on vahele jäetud sammud, seiskunud mootorid, liigne vibratsioon ja müra.